
{kind=link}
จากครั้งที่แล้วเราสาธิตการนำเข้าไฟล์ Point cloud เข้ามาใช้งานในโปรแกรม Revit กันแล้ว วันนี้เราจะขอมาทดสอบการทำงานกันว่า Point cloud ที่เราไปสแกนมาจากสถานที่ต่างๆ จะสามารถใช้งานได้อย่างมีประสิทธิภาพกันแค่ไหน โดยเราจะทำการสาธิตการสร้างสิ่งปลูกสร้างอย่างง่าย โดยที่ใช้จุดอ้างอิงจาก Point Cloud ที่เราได้จากการสแกนจากเครื่องมือสุดทันสมัยอย่าง Slam 100 ซึ่งมีความสามารถในการสแกนสุดน่าทึ่ง เพราะสามารถเก็บรายละเอียดในจุดเล็กๆ น้อยได้เป็นอย่างดี ด้วยการสร้าง point cloud ได้มากถึง 360,000 จุด / วินาที

หลังจากการนำเข้าไฟล์มาแล้วสิ่งที่อยากแนะนำก่อนการสร้างเลยก็คือการตรวจสอบพื้นในการสแกนก่อนสร้างงานเพราะ เราต้องเช็คก่อนว่าพื้นที่งานที่ได้นั้นคลอบคลุมกับขอบเขตที่เราต้องการหรือไม่ เพราะส่วนใหญ่เมื่อเริ่มงานไปแล้วนั้นอาจจะกลับมาแก้ไขนั้นอาจจะยากไปสักหน่อย โดยเฉพาะงานที่ต้องระบุพิกัดหรือกำหนดจุดต่างๆ
ขั้นตอนการสร้างงาน BIM
1. ขั้นตอนแรกคือการเริ่มต้นงานของเรา โดยเราสามารถคลิดที่คำว่า NEW จากนั้นเลือก Browse เพื่อเลือก Tempage โดยในแต่ละ Tempage นั้นก็จะถูกกำหนดว่าให้เหมาะสมในแต่ละงานของผู้ใช้งาน โดยในตัวอย่างนั้นเลือกเป็นแบบงาน Constrution ซึ่งเป็นรูปแบบพื้นฐานของการทำงาน

2. จากนั้นให้เราเรียกไฟล์ Point Cloud เข้ามาเพื่อเป็นตัวแม่แบบหรือเป็นข้อมูลอ้างอิงก่อนเริ่มออกแบบ โดยไปที่ Insert จากนั้นคลิกที่ Piont cloud ซึ่งเราสามารถนำเข้าไฟล์ .RCP ได้ทันที
3. โดยโปรแกรม จากแสดงภาพเป็นแบบ 2 มิติหรือคล้ายพิมพ์เขียวให้เราดู ซึ่งหากผู้ใช้งานอยากชมในรูปแบบ 3มิติ ให้กดไอคอนรูปบ้าน บริเวณด้านบนของจอ โปรแกรมจะแสดงออกเป็น 3 มิติทันที

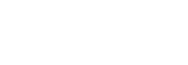
4. จากนั้นเราจะทำการวัดพื้นที่ ของจุดที่เราต้องการทำงาน ในตัวอย่างจะเป็นการสร้างกำแพงเพื่อปิดทางจอดรด โดยกดที่คำสั่ง Wall ต่อด้วย Measure จากนั้นเราสามารถนำเม้าส์ไปคลิกที่จุดเริ่มต้นได้เลยและลากเมาส์ไปยังจุดสิ้นสุดของอีกฝั่งได้ทันทีโดยที่โปรแกรมนั้นจะแสดงค่าความยาวของสิ่งที่เราวัดได้แบบ Real time และยังมีโหมด Auto Snap ที่ช่วยให้เรานั้นสามารถคาดการแต่ละจุดได้แม่นยำขึ้นอีกด้วย

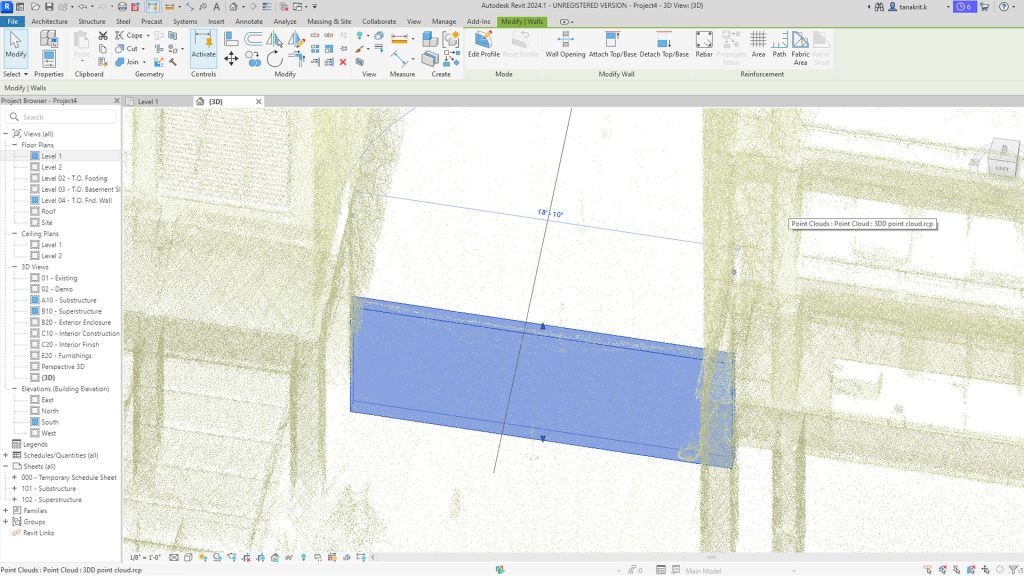
5. มาถึงขั้นตอนำการสร้างกำแพงกันบ้าง ซึ่งทุกคนสามารถกดที่คำสั่ง Structure และเลือกเครื่องมือ Wall ได้เลย ซึ่งในขึ้นตอนการสร้างกำแพงนั้นก็จะคล้ายกับการวัดความยาว คือการคลิกแล้วลากจากฝั่งหนึ่งไปอีกฝั่งหนึ่ง

6. แน่นอนว่าในการทำงานนั้นย่อมมีการแก้ไขอย่างแน่นอน ซึ่งเราสามารถปรับขนาดต่างๆ ของกำแพงได้โดยที่คลิกบริเวณขอบมุมของกำแพง และยังสามารถเลื่อนตำแหน่งของกำแพงได้จากคำสั่ง MOVE (เครื่องหมายที่มีลูกศร 4 แฉก)

7. นอกจากนี้เรายังสามารถใส่รายละเอียดไปบนกำแพงได้อีกด้วย โดยไปที่แถบเครื่องมือ Properties ได้ทันที ไม่ว่าจะเป็นใส่สีของกำแพง ใส่พื้นผิวหรือเพิ่มความเหมือนจริงให้กับกำแพงก็ทำได้ในเครื่องมือนี้
โดยสรุปแล้วในงานออกแบบเชิงวิศวกรรม หรืองานก่อสร้างที่ต้องใช้ความแม่นยำนั้น Piont cloud จากเครื่องสแกน Slam 100 นั้นสามารถตอบโจทย์ได้เป็นอย่างดี เพราะด้วยความละเอียดถึง 360,000 จุดต่อวินาทีทำให้ได้ความละอียดอย่างมาก นอกจากนี้ความเร็วในการสแกนนั้นก็ถือว่าเร็วอยู่ในระดับของเครื่องสแกนระบบเดียวกันที่ราคาแพงกว่าถึง 5 เท่า และยิ่งไปกว่านั้นการใช้งานบนโปรแกรม BIM นั้นก็สามรถนำไฟล์ออกมาใช้ได้อย่างไม่ยากนัก (คลิกที่นี่) และนอกจากโปรแกรม Revit ที่เรานำมาสาธิตกันในครั้งนี้แล้ว เรายังสามารถของไฟล์ piont cloud ไปใช้ได้กับโปรแกรมอื่นๆ ได้อีกด้วย เพราะไฟล์ .LAS นั้นถือว่าเป็นไฟล์ที่ได้รับในระดับสากล