
{kind=link}
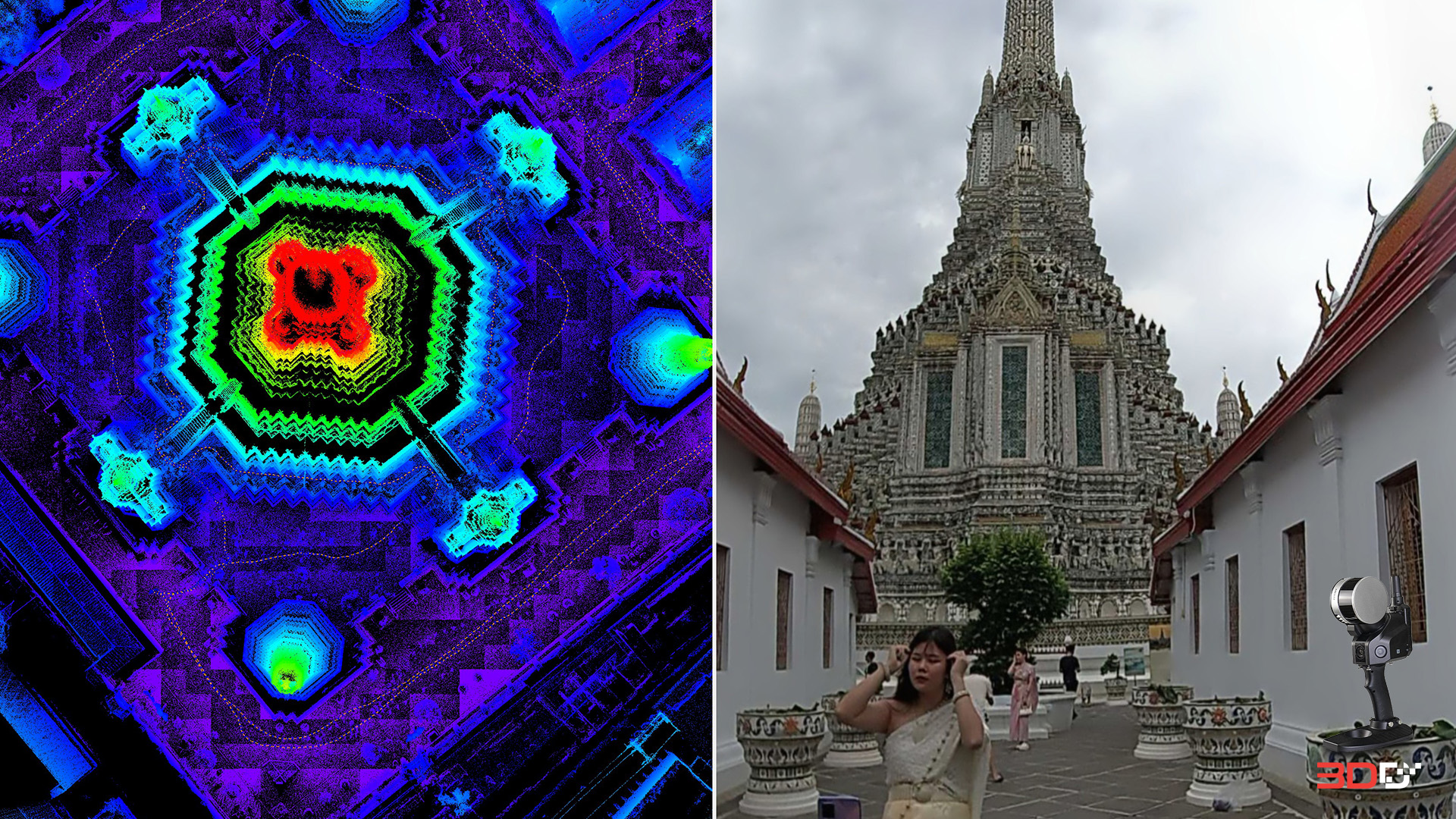
ใน EP.7 เราใช้เครื่องสแกน SLAM100 จากที่เคยใช้เครื่อง Matterport Pro3 มาใน EP.3 เราไปสแกนที่วัดอรุณกันมารอบหนึ่งแล้ว (ใช้ Matterport ใช้เวลาในการสแกน 5ชม. ใช้ SLAM100 ใช้เวลาในการสแกน 25นาที) เราไปวัดอรุณช่วงเย็นแล้วและมีฝนตกพร่ำพรา ที่สำคัญมีนักท่องเที่ยวเยอะมาก โดยมากเป็นทัวร์จีน ใส่ชุดไทยสวยงามยืนถ่ายเยอะแยะมากมากมาย ซึ่งจะสแกนยากกว่าปรกติเราไปดูกันว่าเราสแกนได้หรือเปล่า
ขั้นตอนการสแกน
การสแกนสามารถสร้างเป็น Patterm มาตรฐานได้ดังนี้ ก่อนสแกน — วางแผนศึกษาพื้นที่ต้องการสแกน อาจจะจาก Google Maps ขณะสแกน — เดินให้ครบ Loop เริ่มและจบด้วยจุดเดียวกัน เดินเป็นวงกี่ Loop ก็ได้แต่ขอให้เริ่มกับจบจุดเดียวกัน หลังสแกน — นำไฟล์ที่ได้มาประมวลด้วย PC จะได้ Point Cloud ที่ละเอียดแม่นยำมากขึ้น แต่มาคราวนี้จะแปลกว่าทุกครั้งเพราะว่า วางแผนไม่ได้เนื่องจากนักท่องเที่ยวเยอะมาก และ ฝนตก
Pre-Scan วางแผนงานสแกน
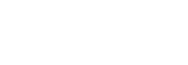
จุดมุ่งหมายของการสแกนครั้งนี้ต้องการเก็บพระปรางค์ให้มากที่สุดเท่าที่ทำได้ โดยวางแผนไว้หลวมๆ โดยการเดินวนรอบฐาน 1รอบ ขึ้นไปวนด้านบนอีกหนึ่งรอบ และเก็บส่วนอาคารหน้าพระปรางค์ ให้ได้มากที่สุด

Scan เดินรวดเดียวจบ ด้วย SLAM100
เราเดินรวดเดียว 25นาที พยายามเลี่ยงนักท่องเที่ยวให้มากที่สุด ขณะเดินมีฝนตกด้วย


Post-Scan นำข้อมูลการประมวลผลด้วย PC
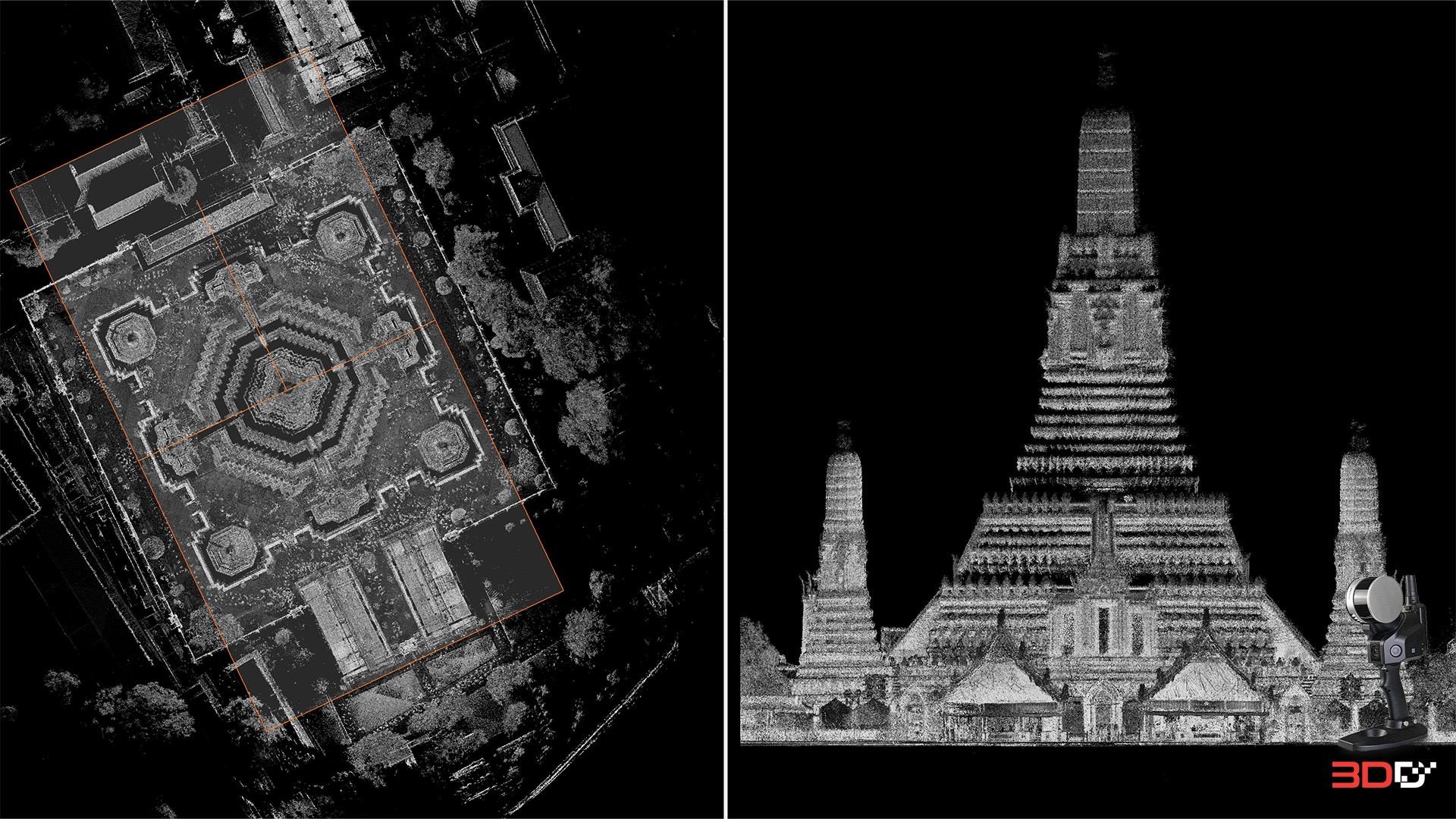
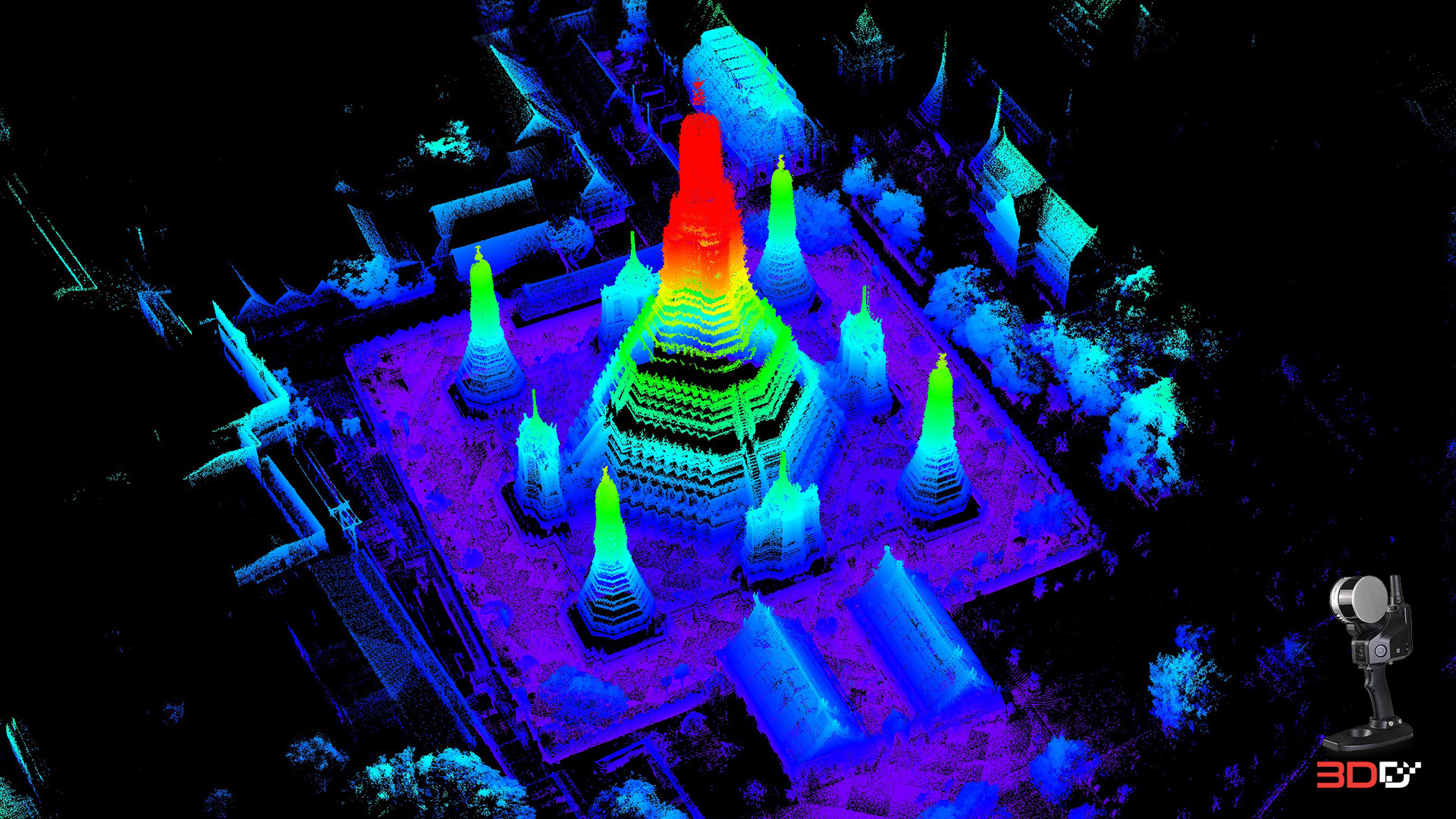
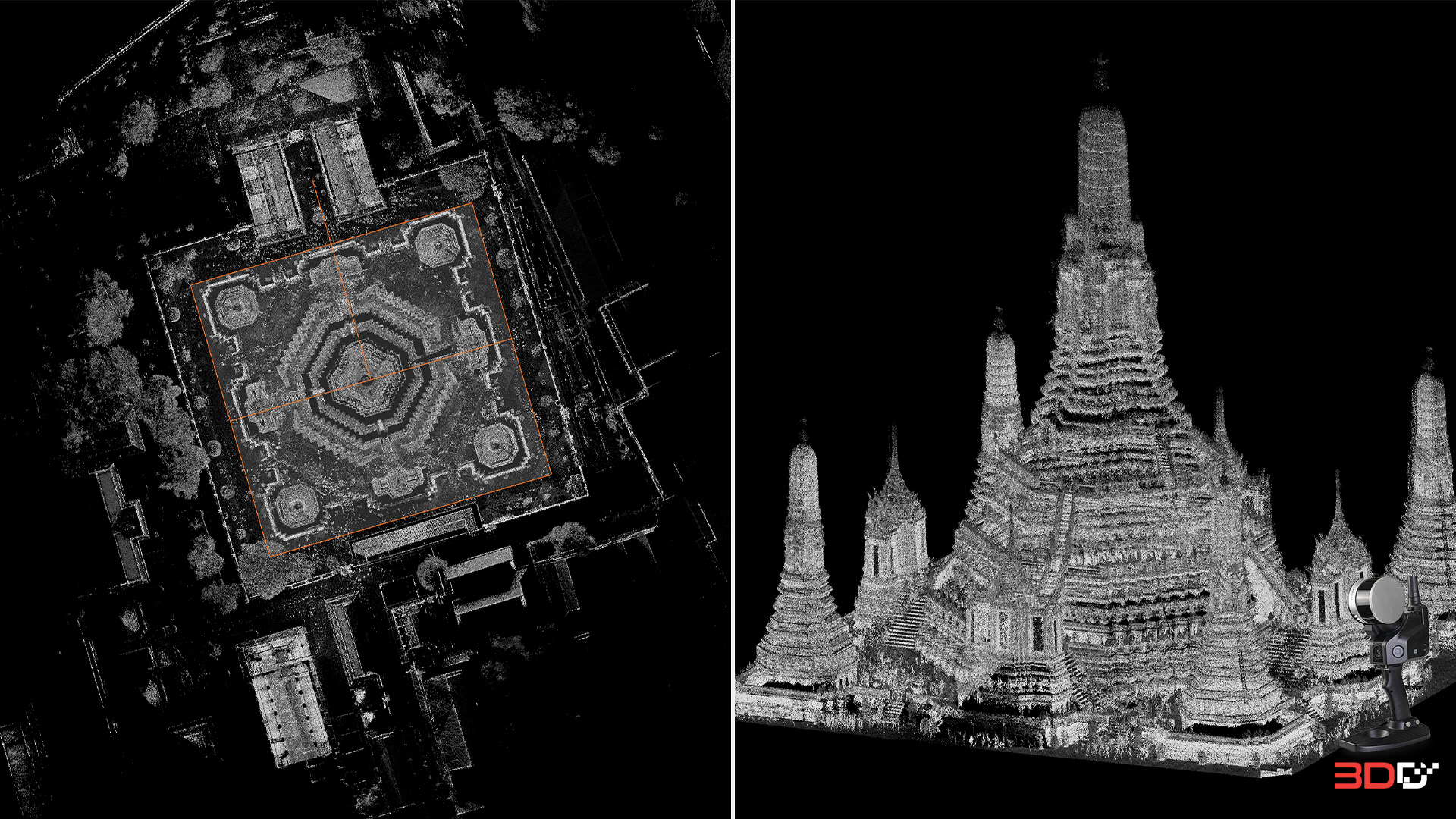
เราเอาข้อมูลที่ได้จากการสแกนมาประมวลผลอีกทีด้วยคอมพิวเตอร์ ใช้เวลาประมาณ 45นาทีได้ผลลัพธ์ออกมาตามรูปที่โชว์ด้านล่าง
Result ผลลัพธ์ที่ได้
- เครื่องสแกนที่ใช้ SLAM100
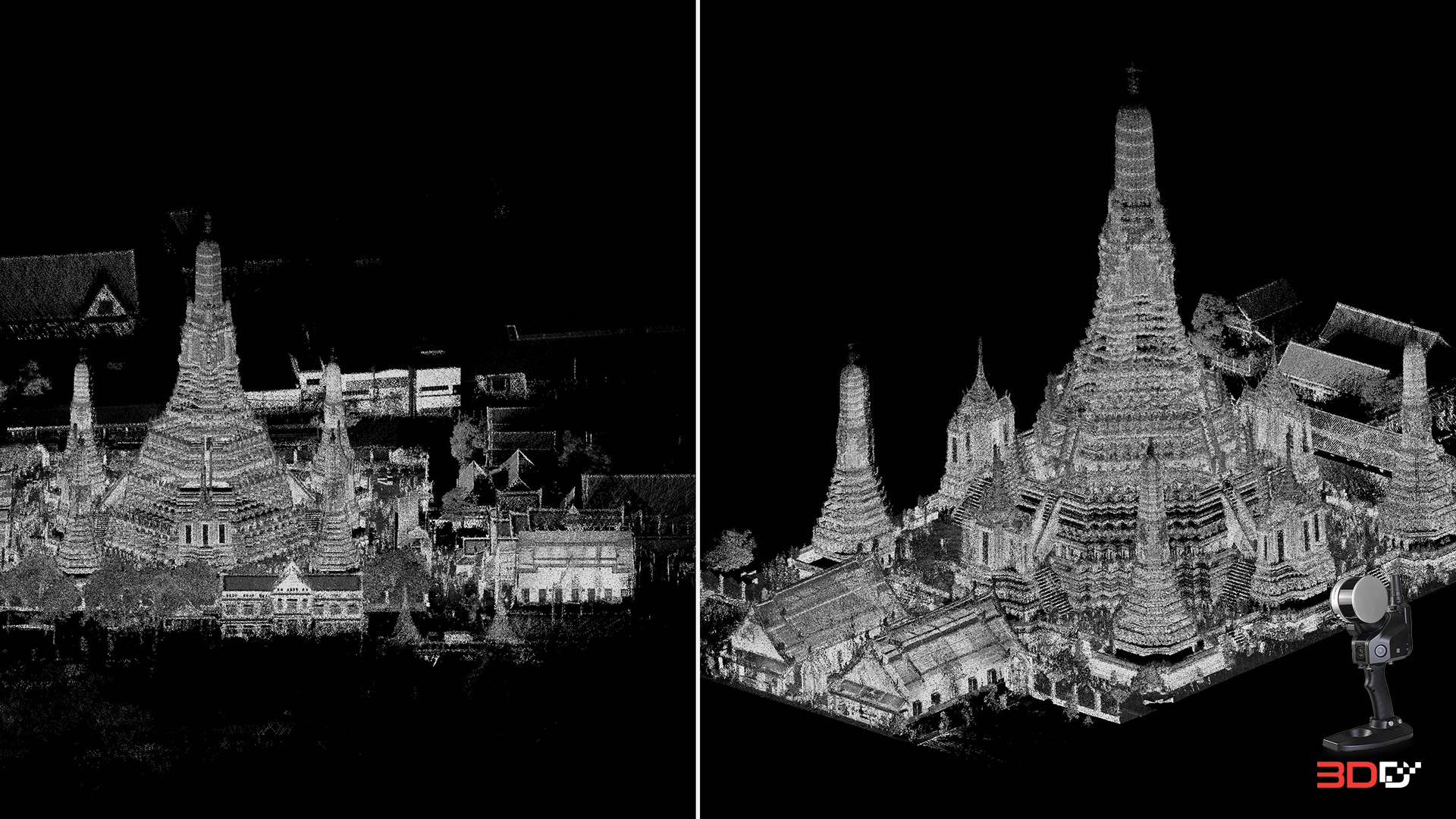
- งานสแกนที่ได้ มีจำนวน Point Cloud 200ล้านจุด
- ใช้เวลาในการเดินสแกน 25นาที
- ไฟล์ 3มิติที่ได้มาสามารถนำไปทำต่อ ได้อีกมากมาย เช่น Revit, Geomagic, Agisoft Metashape, Unreal, SketchUp เป็นต้
- ถ้าจะใช้แค่วัดขนาดสามารถทำได้ที่ Software ที่ให้มากับเครื่องเลย
- สามารถเอาทำงานต่อได้หลากหลาย เช่นงานอนุรักษ์ การบำรุงรักษา งานวิเคราะห์โครงสร้าง งานสร้างโมเดล 3มิติ และ VR, AR, XR